21世紀(jì)經(jīng)濟(jì)報道記者何煦陽 報道

摘要:“當(dāng)你解決了一個問題之后,你發(fā)現(xiàn)之前很多解決不了的難題正在被新的方法論輕松地解決。”
2019年,何小鵬曾提出一句頗具爭議的話——“如果只有電動化,電動車沒有未來”。這句看似反常識的話,實(shí)際上并不反常識——如果說電動化只是讓傳統(tǒng)車換了一身皮囊,那么電動化基礎(chǔ)上的智能化,才是其與傳統(tǒng)汽車徹底區(qū)別開的核心。
六年前,敢于重金投入智能駕駛研發(fā)的競爭對手寥寥,至暗時刻也不削減智駕投入的何小鵬,需要一遍又一遍跟人解釋。但如今,這個觀點(diǎn)已成為行業(yè)共識。這位始終將智能駕駛視為 “汽車下半場核心戰(zhàn)場” 的創(chuàng)業(yè)者,十年間用“All in 智駕”的孤注一擲,帶領(lǐng)團(tuán)隊從 XPILOT 1.0 迭代至 VLA 大模型時代,使得智能化成為小鵬汽車最鮮明的標(biāo)簽。
但小鵬的王冠正遭遇前所未有的挑戰(zhàn)。10月9日,一則人事變動公告打破行業(yè)平靜:小鵬原智駕一號位李力耘卸任,由世界基座模型負(fù)責(zé)人劉先明接棒。這恰與近期小鵬智駕的市場反響形成微妙呼應(yīng) —— 不少用戶反饋,小鵬最新推送的智駕5.7.8版本效果不佳。
更激烈的圍剿來自身后的追兵。理想汽車剛在 ICCV頂會(國際計算機(jī)視覺大會,計算機(jī)視覺三大頂會之一)上亮出 “世界模型 + 訓(xùn)練閉環(huán)” 的最新智駕方案,其開源數(shù)據(jù)集3DRealCar被學(xué)術(shù)界AI頂會認(rèn)可并收錄;華為公開挑戰(zhàn)小鵬、理想等車企所走的VLA路線,宣布其 ADS 4.0 已經(jīng)推出,乾崑智駕系統(tǒng)的搭載量已突破100萬輛,覆蓋11家車企、28款車型。
當(dāng)智駕化的王冠遭到?jīng)_擊,小鵬如何守擂?
重壓之下,小鵬在科技日給出了反擊的答案。何小鵬宣布,
何小鵬表示,小鵬此前在智駕研發(fā)中同時推進(jìn)兩條技術(shù)路線,其中一條為以視覺、語言與動作融合的VLA(vison-languange-action,視覺-語言-動作模型)模型。當(dāng)?shù)诙鶹LA在訓(xùn)練中出現(xiàn)“涌現(xiàn)”特性,表現(xiàn)出更優(yōu)的學(xué)習(xí)與決策能力后,小鵬決定暫停另一條傳統(tǒng)路線的研發(fā),全面聚焦于以大模型為核心的VLA體系。最后實(shí)現(xiàn)了驚喜的“涌現(xiàn)”——自動駕駛系統(tǒng)竟自發(fā)地具備了前所未有的能力。
而為了打造第二代VLA,小鵬所做的遠(yuǎn)不止于此。他們還親手拆了過往賴以成功的經(jīng)驗,耗費(fèi)20億元,在黑暗中獨(dú)自摸索,在無數(shù)次自我懷疑和失敗后,才最終淬煉出這套全新的自動駕駛系統(tǒng)。

這一嶄新的VLA范式,之后會同步運(yùn)用到小鵬的Robotaxi、人形機(jī)器人IRON以及飛行汽車上——這是小鵬試圖打造的“物理AI”帝國。斯坦福大學(xué)人工智能教授李飛飛同樣高度重視“物理AI”(她稱之為“空間智能”),她認(rèn)為:“復(fù)雜語言為人類所獨(dú)有,其進(jìn)化花費(fèi)不到50萬年;但生物理解、互動與溝通3D世界,進(jìn)化了足足5.4億年。對我來說,這才是人工智能的根本問題,如果不解決空間智能,通用人工智能就不完整。”
而這也是“孤勇者”小鵬的下一站:“AI的未來不僅存在于代碼和屏幕中,更在于成為人類在物理世界中的延伸與伙伴。這條路充滿挑戰(zhàn),意味著我們要讓AI學(xué)會處理現(xiàn)實(shí)世界中無窮的“不確定”,這比任何實(shí)驗室的測試都難上百倍、千倍。”這是何小鵬在AI科技日上的宣言。
兩種探索:標(biāo)準(zhǔn)VLA,還是創(chuàng)新VLA?
在科技日之前,小鵬采取的是“VLM+VLA+強(qiáng)化學(xué)習(xí)”的方案,該框架由今年6月,時任小鵬世界基座模型負(fù)責(zé)人的劉先明博士在頂會CVPR(IEEE國際計算機(jī)視覺與模式識別會議,計算機(jī)視覺領(lǐng)域三大頂級會議之一)中提出。他發(fā)表的《通過大規(guī)模基礎(chǔ)模型實(shí)現(xiàn)自動駕駛的規(guī)模化》(Scaling up Autonomous Driving via Large Foudation Models)的演講,奠定了小鵬整個智駕框架。
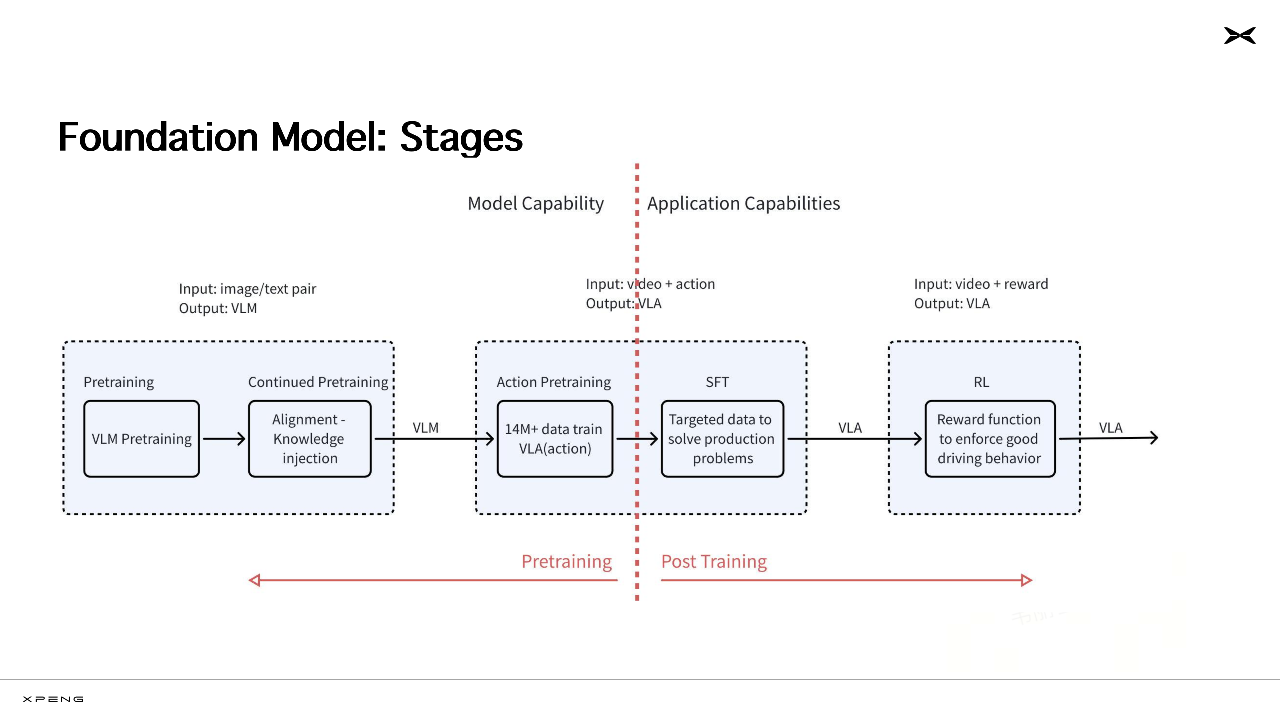
在演示中,他將小鵬物理世界基座模型分了三個階段(Foundation Model Stages):
· 第一個階段,主題是輸入圖像、文本(Input: image/text pair),輸出視覺語言模型(Visual Language Model,視覺-語言模型)。
首先通過視覺-語言模型的預(yù)訓(xùn)練(VLM Pretraining),即用大數(shù)據(jù)訓(xùn)練模型,讓模型識別交通標(biāo)志、理解導(dǎo)航指令等;
接著持續(xù)預(yù)訓(xùn)練(Continued Pretraining),再進(jìn)行對齊,并注入知識(Alignment - Knowledge injection),讓VLM模型學(xué)會“紅燈必須停、 環(huán)島要讓行、雨天要減速燈”等知識,這樣學(xué)完后模型就能理解圖像和文本;
· 第二個階段,主題是輸入視頻和動作(Input: video + action),輸出VLA模型。
首先用超1400萬條數(shù)據(jù)訓(xùn)練VLA模型[14M+ data train VLA(action)],進(jìn)行動作預(yù)訓(xùn)練(Action Pretraining),通俗來說就是給模型灌超過1400萬條“環(huán)境+操作”的視頻,讓模型根據(jù)看到的畫面學(xué)習(xí)駕駛,如轉(zhuǎn)彎先打燈、超車前看看后視鏡等;
然后進(jìn)行監(jiān)督微調(diào)(SFT:Supervised Fine-Tuning),用針對性的數(shù)據(jù)解決問題(Targeted data to solve production problems),對VLA模型進(jìn)行“地獄特訓(xùn)”,特地挑出一系列長尾場景進(jìn)行訓(xùn)練,比如廣州電雞避讓、北京潮汐車道、重慶地形等等。
· 最后一個階段,主題是輸入視頻,并進(jìn)行獎勵(Input: video + reward)。
主要運(yùn)用了強(qiáng)化學(xué)習(xí)(RL,Reinforcement Learning,通過獎勵優(yōu)化模型行為),構(gòu)建獎勵函數(shù)以強(qiáng)化良好駕駛行為(Reward function to enforce good driving behavior),比如安全行駛就+1分,不良行駛就-2分,讓模型在大量做題后駕駛得越來越熟練和安全。
此前《21汽車·一見Auto》曾報道,4月14日小鵬 AI 技術(shù)進(jìn)展分享會上時,小鵬分享過他們構(gòu)建強(qiáng)化學(xué)習(xí)系統(tǒng)的三個維度:獎勵函數(shù)+獎勵模型+世界模型。
劉先明雖然于今年10月接替李力耘成為小鵬自動駕駛一號位,但整個物理世界基座大模型的奠定,離不開前兩任一號位李力耘與吳新宙的鋪墊。
李力耘在去年接受《21汽車·一見Auto》采訪時,他提到規(guī)則時代像是“冷兵器時代”,十八般武藝大家各有所長;而端到端時代是“熱兵器時代”,講究部署大算力、灌大數(shù)據(jù)、訓(xùn)練大模型,就像開采礦物、冶煉鋼鐵。當(dāng)時他已經(jīng)提到,小鵬更重要的投入是云端基座大模型。
吳新宙于2019年成為小鵬自動駕駛負(fù)責(zé)人,當(dāng)時自動駕駛還處于“規(guī)則時代”,但在2022年4月,他就帶領(lǐng)小鵬對自動駕駛中感知、規(guī)劃、控制等模塊做AI化嘗試。而且,彼時規(guī)則時代留下的經(jīng)驗,成為了如今小鵬獎勵函數(shù)的組成部分。
新帥接棒并非另起爐灶,而是薪火相傳。吳新宙的開疆拓土,和李力耘的量產(chǎn)落地,才讓如今劉先明得以推動小鵬自動駕駛向物理AI時代跨越。

只不過,理想、小鵬、元戎等公司使用的VLA大模型,在今年下半年遭到了來自華為、蔚來甚至宇樹等機(jī)器人公司的嚴(yán)厲挑戰(zhàn),其炮火主要集中在兩處:
第一,VLA對多模態(tài)數(shù)據(jù)量、算力、內(nèi)存、帶寬的需求都極為龐大。VLA依賴海量多模態(tài)數(shù)據(jù)訓(xùn)練,對跨模態(tài)數(shù)據(jù)對齊有嚴(yán)格要求,尤其在長尾場景中數(shù)據(jù)采集和標(biāo)注難度巨大;對齊之后也要對數(shù)據(jù)進(jìn)行高度壓縮,提升吞吐量,降低數(shù)據(jù)傳輸延遲。
第二,多了一道語言轉(zhuǎn)化,會導(dǎo)致信息丟失和延遲。顧名思義,“VLA”要先把多模態(tài)信息(V)輸入轉(zhuǎn)成語言(L)token,然后通過大語言模型給出動作指令(A)。自然語言的模糊性和簡潔性從根本上決定了它無法完整描述對空間的感知和限制了其規(guī)劃能力,而且多一道轉(zhuǎn)化步驟就意味著多了一份延遲。
華為智能汽車解決方案BU CEO靳玉志表示,把駕駛決策交給VLA,好比讓一位語言學(xué)家去學(xué)開車——他雖然能讀懂交規(guī),卻很難瞬間判斷剎車距離或障礙物方位。宇樹科技創(chuàng)始人王興興甚至直言:“VLA模型是相對傻瓜式的架構(gòu)。”
而與此同時,劉先明意識到小鵬的自動駕駛研發(fā)進(jìn)入了瓶頸期:“我們每天去解corner case,明天解掉99.9%,后天解掉99.99%,可小數(shù)點(diǎn)要摳到多少位才能做到 L4 ?它的收斂速度一定趕不上這個世界變化的速度。”他還分析,為什么不同廠家、不同版本之間拉不開差距,“當(dāng)你的技術(shù)沒有達(dá)到新水平,那就是不停的壓蹺蹺板。只有當(dāng)一個水桶里面的水變得更多了,這個時候你才有余地去做更多的事情。”
于是,小鵬內(nèi)部兵分兩路:何小鵬在科技日上表示,小鵬一直在探索兩套方案,一種是“V→L→A”的標(biāo)準(zhǔn)VLA,另一種是“V+L→A”的創(chuàng)新VLA。
既然小鵬現(xiàn)在的自動駕駛能力無法突破當(dāng)前系統(tǒng)上限,那就是時候創(chuàng)新智駕系統(tǒng)架構(gòu)了。
為了“涌現(xiàn)”,拆掉語言的拐杖
自從6月份證了模型參數(shù)與數(shù)據(jù)規(guī)模擴(kuò)大到百億級別,規(guī)模法則在物理世界中仍然可行之后,小鵬的“大數(shù)據(jù)+大算力+大模型”這一基本智駕理念就沒變過。但如果要從這三者中選一個對小鵬最重要的,那絕對是“大數(shù)據(jù)”。
2025年度小鵬科技日的主題是“涌現(xiàn)”。在機(jī)器學(xué)習(xí)中,“涌現(xiàn)”是指當(dāng)模型規(guī)模(參數(shù)數(shù)量、訓(xùn)練數(shù)據(jù)量、計算資源)突破某個臨界閾值后,量變引發(fā)質(zhì)變,展現(xiàn)出在較小模型中完全不存在的復(fù)雜能力。
小鵬的涌現(xiàn),“師承”大語言模型ChatGPT。ChatGPT-1于2018年發(fā)布,彼時沒有激起多大水花,直到2022年ChatGPT-3.5發(fā)布,模型出現(xiàn)“涌現(xiàn)”,用戶實(shí)測中發(fā)現(xiàn)其具備多步推理(如解決數(shù)學(xué)謎題)和創(chuàng)造性文本生成能力,遠(yuǎn)超同期模型,彼時其參數(shù)量突破1750億,訓(xùn)練數(shù)據(jù)超過45TB。
而小鵬之所以能“涌現(xiàn)”,背后到底運(yùn)用了多少量級的數(shù)據(jù)?
? 《21汽車?一見Auto》參加小鵬4月份AI技術(shù)分享會時,小鵬宣布自己使用了2000萬Clips的視頻數(shù)據(jù);
? 6月份劉先明博CVPR發(fā)表演講時,宣布小鵬已經(jīng)使用了5000萬Clips的視頻數(shù)據(jù),相當(dāng)于看了3萬部《流浪地球》;
? 而到11月的科技日,何小鵬宣布:小鵬已經(jīng)使用了近1億Clips數(shù)據(jù),“相當(dāng)于駕駛35000年才能遇到的極限場景總和。”
為什么小鵬賣的車不是最多,收集和訓(xùn)練的數(shù)據(jù)卻能是全國之最?
在面對《21汽車?一見Auto》提問時,何小鵬的回答是“這就要求Infra(即人工智能基礎(chǔ)設(shè)施,連接算力和應(yīng)用的AI中間層基礎(chǔ)設(shè)施)做得好”。并且他強(qiáng)調(diào),小鵬用以訓(xùn)練的數(shù)據(jù),均為各種Corner case和長尾數(shù)據(jù)。
在訓(xùn)練了如此龐大的數(shù)據(jù)后,小鵬“涌現(xiàn)”出的駕駛行為,除了已經(jīng)在社交媒體上大量傳播的“路人招手,車會自動停下”“紅綠燈路口,人行橫道的燈從綠變紅時,車會有準(zhǔn)備起步的動作”“車會自行觀察前車輪胎角度判斷對方是否要變道”這三個自動駕駛行為以外,還有另一個功能:“小路NGP”。

“涌現(xiàn)”蓋因訓(xùn)練了龐大的數(shù)據(jù),那小鵬又是因為做了什么才能訓(xùn)練如此巨大的數(shù)據(jù)量?這就要提到第二個“大”——“大模型”,也即小鵬科技日的第二個主角:第二代VLA。
在剩下的兩個“大模型”和“大算力”中,“大模型”——也即第二代VLA——主要負(fù)責(zé)解決的是訓(xùn)練的數(shù)據(jù)規(guī)模問題。何小鵬在發(fā)布會直言:
“標(biāo)準(zhǔn)VLA需要兩次轉(zhuǎn)換,語言作為中間轉(zhuǎn)譯環(huán)節(jié)成為瓶頸,并帶來很高信息損耗,無法在‘很大規(guī)模參數(shù)量’上實(shí)現(xiàn)‘很大規(guī)模的數(shù)據(jù)訓(xùn)練量’”。
因此,拆掉語言(L)這根拐杖,就是涌現(xiàn)的關(guān)鍵。

第二代VLA,同樣分三個階段:
·階段一:多模態(tài)輸入層,相當(dāng)于車怎么“看、聽和感知自己” 。
包括Video(車載攝像頭采集的路況,如路口紅綠燈、旁車距離等)、Text/Language(語言,用戶語音指令,導(dǎo)航文字提示、交規(guī)文本等);Instruction(指令,如“進(jìn)入匝道需降速 20%”等);Ego(自車狀態(tài),如車輛定位、傳感器健康度、當(dāng)前電量等)。
· 階段二:核心編碼層(VLA 2.0),即拆掉語言后,車怎么“想”。
劉先明在Wrokshop中細(xì)致地拆解了祛除“L”之后如何訓(xùn)練VLA的過程,他們參考了大語言模型的方式:
“大模型的做法是語言進(jìn)來,再把任何的東西變成離散的token,然后經(jīng)過Transformer架構(gòu),輸出一下token。整個訓(xùn)練方式,基本上采用自監(jiān)督方式,就是用預(yù)測下一個文字 token 的方式去做這個事情”;
通俗地理解就是“猜詞游戲”——給模型喂海量文字,將“媽媽叫我回家吃飯”,拆成“媽媽”“叫”“我”“回家”“吃飯”多個token,大量訓(xùn)練之后,讓模型預(yù)測下一個token。直到模型找到規(guī)律,發(fā)現(xiàn)“媽媽叫我回家”之后接的token大概率是“吃飯”,訓(xùn)練成功;
而此前VLA的核心痛點(diǎn),就是要給每段路測視頻人工監(jiān)督/標(biāo)注,人工教汽車 “紅圓的叫紅燈,看到要停”,用中間的 L(語言),給 “視覺” 和 “動作” 做配對。但麻煩的是這種方式又慢又貴,且無窮無盡,所以劉先明說:
“想要更大規(guī)模的去使用數(shù)據(jù)的話該怎么辦?一定要拆掉所有的supervision,讓它變成一種自監(jiān)督的模式。只要有中間的“L”存在,就一定涉及到人工的篩選或者標(biāo)注,于是我把它拆掉,把它變成一種非常極致的數(shù)據(jù)應(yīng)用。”
小鵬第二代VLA的思路就是如此——拆掉 “語言(L)” 這個人工教的中間層,讓模型直接從 “路景(V)→駕駛動作(A)” 的海量數(shù)據(jù)里,自己悟物理世界的規(guī)律,比如 “紅燈對應(yīng)剎車”“行人對應(yīng)減速”。
·階段三:閉環(huán)執(zhí)行層:車怎么“做”(A)。包括兩個并行的步驟:
步驟一:Latent Tokens(潛在表征 tokens)→ World Simulation (世界模擬)→ Reinforcement Learning(強(qiáng)化學(xué)習(xí))→ Action(駕駛動作);
通俗理解,整個過程好比:汽車在自動駕駛時,先提煉視頻全景中的關(guān)鍵信息(Latent Tokens):“危險目標(biāo):距離近的小孩”、“旁邊停著電動車”、“路面2米寬”等;
然后腦補(bǔ)接下來可能會出現(xiàn)的各種場景(World Simulation):“急剎車”“先輕踩剎車降速”等;
接著翻出之前訓(xùn)練過的經(jīng)驗(Reinforcement Learning):“上次類似場景 ‘急剎車’ 被追尾,扣分”、“上次 ‘減速 + 輕打方向’ 安全通過,加分”等;
最后執(zhí)行動作(Action):慢慢踩剎車,同時方向盤輕輕向左打,順利避開小孩,也沒碰旁邊的電動車。
步驟二:Trajectory Tokens(軌跡表征 tokens)→ Action(駕駛動作);
通俗理解,整個過程好比當(dāng) VLA 2.0選好 “減速+輕打方向” 的駕駛方案后,會把這個方案拆成各種軌跡(Trajectory Tokens),如速度軌跡(3 秒內(nèi)把車速從30km/h平穩(wěn)降到10km/h)、方向軌跡(方向盤向左轉(zhuǎn) 15 度),最后汽車照著各種軌跡表征精準(zhǔn)操作。
最后的“大算力”,存在的目的就是讓數(shù)據(jù)的運(yùn)算更“快”。誠然,拆掉“L”本身也已經(jīng)減少了轉(zhuǎn)譯的過程,從而減少了延遲,但因此涌入模型中訓(xùn)練的數(shù)據(jù)也更加龐大,所以小鵬才要自建萬卡集群、自研圖靈芯片、優(yōu)化芯片-算子-模型。
小鵬現(xiàn)在已經(jīng)建立起了多大規(guī)模的云算力?
? 《21汽車?一見Auto》參加小鵬4月份AI技術(shù)分享會時,小鵬宣布從2024年就已開始搭建AI基礎(chǔ)設(shè)施,已建立起萬卡規(guī)模的智能算力集群;
? 6月份劉先明博士在CVPR發(fā)表演講時,宣布小鵬智能算力集群正向兩萬卡水平前進(jìn);
? 而到11月的科技日,何小鵬宣布:我們使用了阿里云上3萬張卡的云端的超大算力集群;
? 他還展示了小鵬的野望:我相信明年的小鵬可能從3萬張卡要到5萬張卡,甚至到10萬張卡;我相信超大的云端的算力集群是實(shí)現(xiàn)物理AI的重要基礎(chǔ)。

至于芯片與算子,小鵬第二代VLA針對圖靈AI芯片,重新開發(fā)了針對性的編譯器和軟件棧,并對算子做了針對性的優(yōu)化,最后發(fā)現(xiàn)提高了12倍的推理效率。
物理AI的“孤勇者”:拆掉一切,從頭再來
“所以總結(jié)下來,我們這個東西沒有太多‘不能說的秘密’,就是大模型、大算力、大數(shù)據(jù),堆到一塊就變成了我們推出的模型”,劉先明在Workshop分解完小鵬物理AI的每部分后,略略帶輕松地了這么一句。
但真的那么輕松嗎?
回想起來,似乎一切都非常簡單:把“L”拆掉、灌更多數(shù)據(jù)、研發(fā)更高的算力,但對于當(dāng)時的小鵬來說,這些都意味著實(shí)實(shí)在在的花費(fèi),且小鵬仍未盈利,最后也很有可能如此前很多次失敗一樣,第二代VLA的開發(fā)無疾而終。何小鵬透露,為了這一代VLA,小鵬燒了20多億,很長一段時間仍沒有看到任何希望,甚至連開內(nèi)部會議時,有一兩個自動駕駛的高管拒絕參加,因為沒有跑通方案。
直到二季度的某一天,或許是去除“L”的某個技術(shù)細(xì)節(jié)生效,又或許是灌輸?shù)臄?shù)據(jù)達(dá)到了某個量級,第二代VLA跑通了。何小鵬在發(fā)布會講述這段經(jīng)歷時最為激動:“當(dāng)你解決了一個問題之后,你發(fā)現(xiàn)之前很多解決不了的難題正在被新的方法論輕松地解決”。
為此,他們不惜停止了標(biāo)準(zhǔn)VLA的開發(fā),就為了在第二代VLA版本里全力以赴,最后才有了如今物理世界模型在量產(chǎn)上的全新范式。
誠然,目前小鵬第二代VLA還有很多疑點(diǎn)和承諾需要兌現(xiàn)。比如,明年推送的第二代VLA是否真的能實(shí)現(xiàn)“小路NGP”,帶來如今宣傳的“涌現(xiàn)”效果?去掉“L”后,第二代VLA是否還能稱作VLA,以及以往“L”所擁有的常識推理與可解釋性優(yōu)勢,是否也蕩然無存?小鵬已經(jīng)作了多次技術(shù)路線切換,是否能妥善照顧老車主?最后,“涌現(xiàn)”除了驚喜,會不會帶來不想要的意外?
但這一切暫時不重要,因為小鵬的勇氣依舊值得肯定,它依然配稱為中國智駕的先鋒和開拓者。它令人聯(lián)想起同時獲得圖靈獎和諾貝爾物理學(xué)獎的人工智能學(xué)家杰弗里?辛頓(Geoffrey Hinton):
70年代,辛頓進(jìn)入愛丁堡大學(xué)攻讀博士時,符號主義正如日中天,但辛頓卻“迷信”神經(jīng)網(wǎng)絡(luò)。80年代他提出反向傳播算法,雖然解決了訓(xùn)練難題,卻受限于當(dāng)時的算力與數(shù)據(jù)瓶頸。90年代,隨著支持向量機(jī)等統(tǒng)計學(xué)習(xí)方法興起,神經(jīng)網(wǎng)絡(luò)幾乎被徹底邊緣化。一直到2012年,他與與生合作開發(fā)的八層神經(jīng)網(wǎng)絡(luò)在 ImageNet 競賽中以 15.3% 的錯誤率奪冠,才一夜成名,并徹底點(diǎn)燃了深度學(xué)習(xí)革命。
人類的創(chuàng)新,大部分都像在黑暗里摸索,為了躲避寒冷,人們常常追求大眾和主流的庇護(hù),而創(chuàng)新者除了勇氣一無所有。劉先明分享此前探索的心得時透露,大部分企業(yè)在做VLA時,都在跟隨π0結(jié)構(gòu)(Pi-Zero,由 Physical Intelligence 公司推出的VLA大模型),因為有大量開源的模型可以直接拿來用肯定的推理,但只有他們看出了這個結(jié)構(gòu)會限制數(shù)據(jù)使用的規(guī)模。
“一家企業(yè),或者一個團(tuán)隊,如何才能成為一個偉大的團(tuán)隊,核心就是得拆掉過去的一些成功經(jīng)驗。去看你的邊界在哪,然后去探索未知,即便你根本不知道還存在什么問題,也要去探索、去拆掉自己過去賴以成名或者成功的經(jīng)驗,才可能再進(jìn)一步往下走。”劉先明說。
唯有壯士斷腕,才能擁抱新生,即便這可能充滿了不確定性。正因如此,小鵬為了這次“涌現(xiàn)”,拆掉的拐杖不止語言。它摒棄的不止是“L”,更是對昔日成功路徑的依賴。唯有壯士斷腕,才能擁抱新生,即便這可能充滿了不確定性。








